Citroen C4: Top Rear Vision - 360 Vision
Met MyCitroën Play
Raadpleeg de algemene adviezen over het gebruik van de rij- en parkeerhulpsystemen.
Bij draaiende motor kunnen met deze systemen weergaven van de directe omgeving van de auto worden weergegeven op het touchscreen met behulp van één camera bij Top Rear Vision en twee camera's bij 360 Vision.

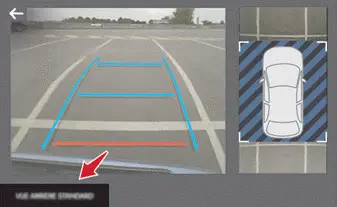
Het scherm is in twee delen opgedeeld, met in het ene deel de omgeving zoals die door de camera('s) wordt geregistreerd en in het andere deel het beeld van bovenaf van de directe omgeving van de auto.
De informatie van de parkeerhulpsensoren vult het beeld van bovenaf aan.
Er kunnen diverse weergaven worden weergegeven:
- Standaardweergave.
- 180º weergave.
- Ingezoomde weergave.
Standaard is de stand AUTO geactiveerd.
In deze stand kiest het systeem voor de beste weergave (standaard of ingezoomd).
U kunt tijdens het manoeuvreren op elk gewenst moment de weergave wijzigen.
► Druk op de toets in de hoek linksonder van het touchscreen.
► Selecteer een type weergave:
- "Standaardweergave".
- "180º view".
- "Ingezoomde weergave".
- "AUTO view".
De weergave wordt onmiddellijk aangepast aan het geselecteerde type.
De systeemstatus wordt niet opgeslagen bij het afzetten van het contact.
Werkingsprincipe
Dit systeem registreert tijdens het manoeuvreren bij lage snelheid met één of twee camera's de omgeving van de auto.
Van boven de auto wordt er, in realtime en terwijl de manoeuvre wordt uitgevoerd, een beeld van de directe omgeving gereconstrueerd (weergegeven tussen de haakjes).
Deze weergave maakt het recht inparkeren gemakkelijker en biedt de mogelijkheid om de obstakels in de buurt van de auto te zien. Dit beeld verdwijnt automatisch als de auto langere tijd stilstaat.
Bij de 360 Vision wordt het beeld samengesteld door beide camera's, zowel bij het vooruitrijden als bij het achteruitrijden.
Wanneer de functie is geactiveerd, kan het zijn dat het beeld van bovenaf niet wordt weergegeven. Als het systeem wordt geactiveerd wanneer de auto al is verplaatst, kan het beeld van bovenaf volledig worden weergegeven.
Top Rear Vision
Beeld achterzijde
U activeert de camera bij de kentekenplaatverlichting door de achteruitversnelling in te schakelen en niet harder dan 10 km/h te rijden.
De functie wordt uitgeschakeld:
- Automatisch, bij snelheden hoger dan ongeveer 20 km/h,
- Automatisch, als de bagageruimte wordt geopend.
- Als er uit de achteruitversnelling wordt geschakeld.
- Als op de witte pijl linksboven in de hoek van het touchscreen wordt gedrukt.
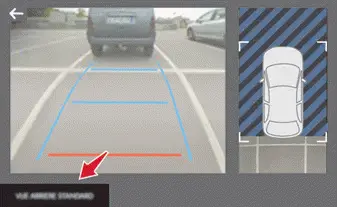
Stand AUTO
Deze stand is standaard geactiveerd.
Wanneer een obstakel zich ter hoogte van de rode lijn bevindt (minder dan 30 cm van de auto) wordt dankzij de sensoren in de achterbumper automatisch overgeschakeld van de weergave van de omgeving achter de auto (standaard) naar de weergave van het beeld van bovenaf (ingezoomd) van de auto.
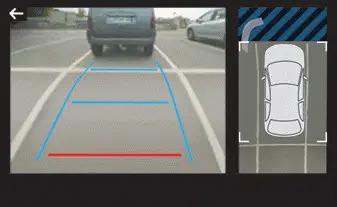
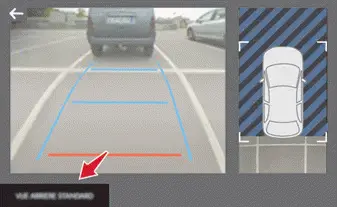
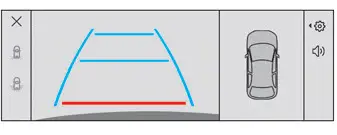
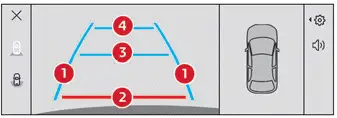
Standaardweergave
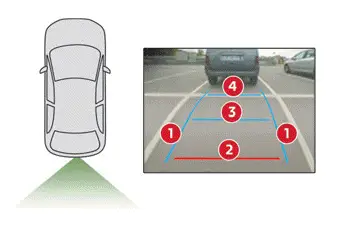
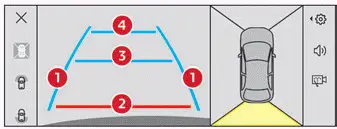
Het gebied achter de auto wordt weergegeven op het scherm.
De blauwe lijnen (1) geven de breedte van de auto weer met uitgeklapte buitenspiegels; ze verplaatsen zich afhankelijk van de stand van het stuurwiel.
De rode lijn (2) geeft een afstand van 30 cm vanaf de achterbumper weer; de twee blauwe lijnen (3) en (4) een afstand van respectievelijk 1 m en 2 m.
Deze weergave is beschikbaar in de stand AUTO of door deze te selecteren in het menu voor het veranderen van de weergave.
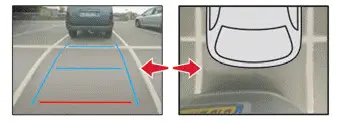
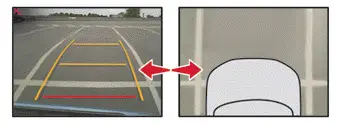
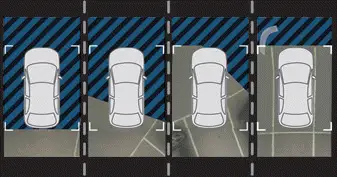
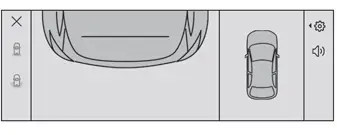
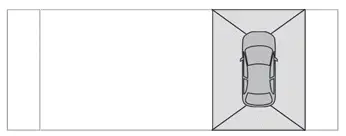
Ingezoomde weergave
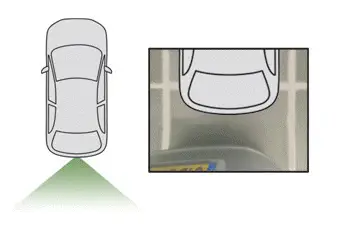
De camera registreert de omgeving tijdens het manoeuvreren om een samengesteld beeld van bovenaf van de achterzijde van de auto en van zijn nabije omgeving te creëren zodat de obstakels rondom de auto goed zichtbaar zijn.
Deze weergave is beschikbaar in de stand AUTO of door deze te selecteren in het menu voor het veranderen van de weergave.
De obstakels kunnen verder weg lijken dan ze in werkelijkheid zijn.
Tijdens het manoeuvreren moet u de zijkanten van de auto via de buitenspiegels in de gaten houden.
De parkeersensoren geven ook extra informatie over het gebied rondom de auto.
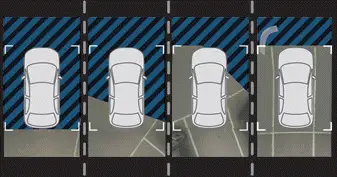
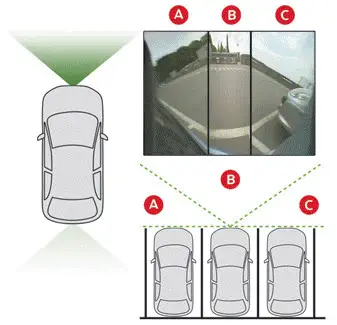
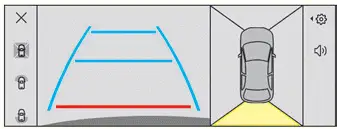
180º-weergave
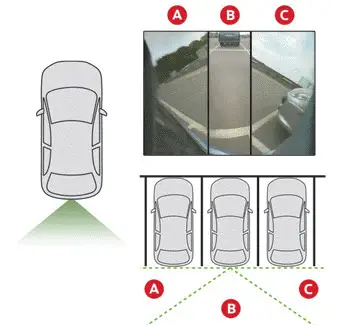
Wanneer u achteruitrijdend een parkeerplaats verlaat, kunt u dankzij de 180º-weergave voertuigen, voetgangers of fietsers zien aankomen.
Wij raden u aan om deze weergave niet tijdens de gehele manoeuvre te gebruiken.
De weergave heeft drie zones: links A, midden B en rechts C.
Deze weergave is alleen beschikbaar door deze te selecteren in het menu voor het veranderen van de weergave.
360 Vision
De auto is voorzien van een in de grille geplaatste camera vóór en een camera achter die in de buurt van de kentekenplaatverlichting is geplaatst.
Dankzij deze camera's kan het systeem de nabije omgeving van de auto weergeven op het touchscreen, waarbij u kunt kiezen uit een weergave van de omgeving achter de auto (camera achter), als de achteruitversnelling is ingeschakeld, en een weergave van de omgeving vóór de auto (camera vóór), als de versnellingsbak in de neutraalstand staat of een vooruitversnelling is ingeschakeld.
Beeld van de camera achter
Het systeem wordt automatisch geactiveerd wanneer de achteruitversnelling wordt ingeschakeld.
De functie wordt uitgeschakeld:
- Automatisch, bij snelheden hoger dan ongeveer 20 km/h.
- Wanneer u uit de achteruitversnelling schakelt (de weergave van de camera voor vervangt de weergave van de camera achter gedurende 7 seconden).
- Als op de witte pijl linksboven in de hoek van het touchscreen wordt gedrukt.
Als een aanhanger is aangekoppeld of een fietsendrager is gemonteerd op de trekhaak, wordt het gebied achter de auto op het beeld van bovenaf van de auto zwart weergegeven.
De beelden van de omgeving worden dan uitsluitend samengesteld met behulp van de camera vóór.
De verschillende weergaves van de camera achter komen overeen met de weergaves die beschreven zijn in het gedeelte over de functie Top Rear Vision.
Zie het betreffende hoofdstuk voor meer informatie over de functie Top Rear Vision.
Beeld van de camera's voor en achter
 Bij draaiende motor en een
rijsnelheid van
maximaal 20 km/h kunt u deze functie
activeren via het menu Rijverlichting/Auto van het
touchscreen:
Bij draaiende motor en een
rijsnelheid van
maximaal 20 km/h kunt u deze functie
activeren via het menu Rijverlichting/Auto van het
touchscreen:
► Selecteer "Parkeerhulp".
De stand AUTO wordt standaard gebruikt, met een weergave van de omgeving vóór de auto als de versnellingsbak in de neutraalstand staat of een vooruitversnelling is ingeschakeld, en een weergave van de omgeving achter de auto als de achteruitversnelling is ingeschakeld.
De functie wordt uitgeschakeld:
- Automatisch, als de rijsnelheid hoger wordt dan ongeveer 30 km/h (het beeld verdwijnt tijdelijk vanaf een snelheid van 20 km/h).
- Als op de witte pijl linksboven in de hoek van het touchscreen wordt gedrukt.
Stand AUTO
Deze stand is standaard geactiveerd.
Wanneer u een obstakel nadert, wordt dankzij de sensoren in de voorbumper automatisch overgeschakeld van de weergave van de omgeving vóór de auto (standaard) naar de weergave van het beeld van bovenaf van de auto (zoom).
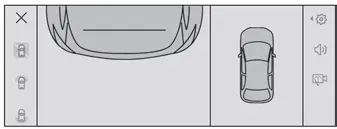
Standaardweergave
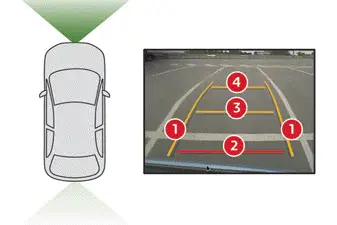
Het gebied vóór de auto wordt weergegeven op het scherm.
De oranje lijnen 1 geven de breedte van de auto weer met uitgeklapte buitenspiegels; ze verplaatsen zich afhankelijk van de stand van het stuurwiel.
De rode lijn 2 geeft een afstand van 30 cm vanaf de voorbumper weer; de twee oranje lijnen 3 en 4 een afstand van respectievelijk 1 en 2 meter.
Deze weergave is beschikbaar in de stand AUTO of door deze te selecteren in het menu voor het veranderen van de weergave.
Ingezoomde weergave
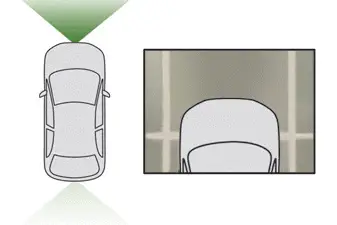
De camera registreert de omgeving tijdens het manoeuvreren om een samengesteld beeld van bovenaf van de voorzijde van de auto en van zijn nabije omgeving te creëren zodat de obstakels rondom de auto goed zichtbaar zijn.
Deze weergave is beschikbaar in de stand AUTO of door deze te selecteren in het menu voor het veranderen van de weergave.
De obstakels kunnen verder weg lijken dan ze in werkelijkheid zijn.
Tijdens het manoeuvreren moet u met de buitenspiegels de zijkanten van de auto in de gaten houden.
De parkeerhulp geeft bovendien extra informatie over de omgeving van de auto.
180º-weergave
Wanneer u vooruitrijdend een parkeerplaats verlaat, kunt u dankzij de 180º-weergave voertuigen, voetgangers of fietsers zien aankomen.
Wij raden u aan om deze weergave niet tijdens de gehele manoeuvre te gebruiken.
De weergave heeft drie zones: links A, centraal B en rechts C.
Deze weergave is alleen beschikbaar door deze te selecteren in het menu voor het veranderen van de weergave.
Met MyCitroën Drive Plus
Top Rear Vision
Raadpleeg voor meer informatie de algemene adviezen over het gebruik van de rij- en parkeerhulpsystemen.
Wanneer de achteruitversnelling bij draaiende motor wordt ingeschakeld, geeft dit systeem beelden van de directe omgeving van de auto op het touchscreen weer met behulp van een camera aan de achterzijde van de auto.

Het scherm is in 4 delen opgedeeld met twee zijmenu's, de door de camera's geregistreerde beelden en een weergave van de directe omgeving van de auto van bovenaf gezien.
De informatie van de parkeerhulpsensoren vult het beeld van bovenaf aan.
Er zijn diverse weergaven beschikbaar:
- Automatisch ingezoomde weergave.
- Standaardweergave.
- Panoramische weergave.
Afhankelijk van de omstandigheden kiest het systeem de beste weergave (standaard of automatische zoom).
Het type weergave kan tijdens de manoeuvre altijd worden gewijzigd.
De systeemstatus wordt niet opgeslagen bij het afzetten van het contact.
Werkingsprincipe
Tijdens manoeuvres met een lage snelheid filmt de camera de directe omgeving van de auto.
In realtime wordt een beeld van bovenaf van de auto en de directe omgeving van de auto gecreëerd (en weergegeven op de zijkant van het scherm) terwijl de auto rijdt.
Deze weergave is handig om de auto recht in te parkeren en om de obstakels in de directe omgeving van de auto te zien. Dit beeld verdwijnt automatisch als de auto langere tijd stilstaat.
Instellingen
In het zijmenu:
 In dit venster kunt u het
volgende:
In dit venster kunt u het
volgende:
- het volume van het geluidssignaal aanpassen.
- de camera wassen (afhankelijk van de uitvoering).
 Met deze toets kunt u het
geluidssignaal
dempen / weer laten horen.
Met deze toets kunt u het
geluidssignaal
dempen / weer laten horen.
Inschakelen / uitschakelen
Schakel de achteruitversnelling in om de camera in te schakelen.
Het systeem wordt uitgeschakeld:
- bij het schakelen uit de achteruitversnelling en een snelheid hoger dan 10 km/h in een vooruitversnelling
- Als op het kruis in de linkerbovenhoek van het touchscreen wordt gedrukt.
Automatisch ingezoomde weergave
De camera achter registreert de omgeving tijdens het manoeuvreren om een samengesteld beeld van bovenaf van de achterzijde van de auto en van zijn nabije omgeving te creëren zodat de obstakels rondom de auto goed zichtbaar zijn.
Met behulp van de sensoren op de achterbumper wordt de automatisch ingezoomde weergave weergegeven wanneer de auto obstakels op de rode lijn (minder dan 30 cm) tijdens de manoeuvre nadert.
Deze weergave is alleen automatisch beschikbaar.
De obstakels kunnen verder weg lijken dan ze in werkelijkheid zijn.
Tijdens het manoeuvreren moet u de zijkanten van de auto via de buitenspiegels in de gaten houden.
De parkeersensoren geven ook extra informatie over het gebied rondom de auto.
Standaardweergave
Het gebied achter de auto wordt weergegeven op het scherm.
De blauwe lijnen (1) geven de breedte van de auto weer met uitgeklapte buitenspiegels; ze verplaatsen zich afhankelijk van de stand van het stuurwiel.
De rode lijn (2) geeft een afstand van 30 cm vanaf de achterbumper weer; de twee blauwe lijnen (3) en (4) een afstand van respectievelijk 1 m en 2 m.
Deze weergave is automatisch beschikbaar of door deze te selecteren in het zijmenu.
Panoramische weergave

Met de panoramische weergave kunt u een parkeerplaats in de achteruitversnelling verlaten waarbij u op de nadering van voertuigen, voetgangers of fietsers kunt anticiperen.
Wij raden u aan om deze weergave niet tijdens de gehele manoeuvre te gebruiken.
Deze weergave is alleen beschikbaar door deze te selecteren in het zijmenu.
360 Vision
Raadpleeg voor meer informatie de algemene adviezen over het gebruik van de rij- en parkeerhulpsystemen.
Met dit systeem kunt u de directe omgeving van uw auto op het touchscreen bekijken met behulp van camera's die aan de voorzijde en achterzijde van de auto zijn geplaatst.

Het scherm is in 4 delen opgedeeld met twee zijmenu's, de door de camera's geregistreerde beelden en een weergave van de directe omgeving van de auto van bovenaf gezien.
De informatie van de parkeerhulpsensoren vult het beeld van bovenaf aan.
Afhankelijk van de weergavehoek die in het menu links is gekozen, biedt het systeem specifieke visuele ondersteuning voor bepaalde rijomstandigheden, zoals het oprijden van een onoverzichtelijk kruispunt of het manoeuvreren in gebieden met verminderd zicht.
Voor de achterzijde of voorzijde zijn diverse weergaven gebaseerd op de door de camera's geregistreerde beelden beschikbaar:
- Automatisch ingezoomde weergave.
- Standaardweergave.
- Panoramische weergave.
Afhankelijk van de omstandigheden kiest het systeem de beste weergave (standaard of automatische zoom).
Het type weergave kan tijdens de manoeuvre altijd worden gewijzigd.
De systeemstatus wordt niet opgeslagen bij het afzetten van het contact.
Werkingsprincipe
Gereconstrueerd beeld
De camera's worden ingeschakeld en een reconstructie van een weergave van bovenaf van uw auto in zijn directe omgeving wordt op het touchscreen weergegeven.
Rechtstreekse weergave
De beelden van de voorzijde en achterzijde worden automatisch in de weergave van bovenaf van de auto opgenomen.
Elke weergave kan ook rechtstreeks worden getoond door de betreffende zone te selecteren.
De weergave van de voorzijde kan worden geselecteerd in een versnelling vooruit tot een snelheid van 16 km/h.
De montage van een sneeuwscherm kan de weergave van de beelden van de camera aan de voorzijde verstoren.
Instellingen
In het zijmenu:
 In dit venster kunt u het
volgende:
In dit venster kunt u het
volgende:
- het volume van het geluidssignaal aanpassen.
- de camera wassen (afhankelijk van de uitvoering).
 Met deze toets kunt u het
geluidssignaal
dempen / weer laten horen.
Met deze toets kunt u het
geluidssignaal
dempen / weer laten horen.
Inschakelen / uitschakelen
Automatisch
Wanneer de motor draait en de auto stilstaat, wordt de weergave achter automatisch via de camera achter weergegeven als de achteruitversnelling wordt ingeschakeld.
Wanneer de motor draait en de auto langzamer rijdt dan 16 km/h, wordt de weergave vóór automatisch via de camera vóór weergegeven als een achteruitversnelling wordt ingeschakeld.
Handmatig
 ► In de app ADAS van het
touchscreen
selecteert u Functies>Panoramische
camera
Het systeem wordt uitgeschakeld:
► In de app ADAS van het
touchscreen
selecteert u Functies>Panoramische
camera
Het systeem wordt uitgeschakeld:
- Automatisch voor de achterzijde wanneer uit de achteruitversnelling wordt geschakeld.
- Automatisch voor de voorzijde wanneer de snelheid hoger is dan ongeveer 16 km/h.
- Als op het kruis in de linkerbovenhoek van het touchscreen wordt gedrukt.
Automatisch ingezoomde weergave
De camera vóór of achter neemt tijdens de manoeuvre de omgeving op om een weergave vóór of achter van bovenaf gezien van de auto in zijn directe omgeving te maken. Op deze manier kan de auto langs de obstakels in de buurt van de auto worden gemanoeuvreerd.
Met behulp van de sensoren op de voor- of achterbumper wordt de automatisch ingezoomde weergave weergegeven wanneer de auto een obstakel op de rode lijn (minder dan 30 cm) tijdens de manoeuvre nadert.
Deze weergave is alleen automatisch beschikbaar.
Afhankelijk van de uitvoering kan deze worden in- / uitgeschakeld in de app ADAS op het touchscreen.
► Selecteer Functies>Panoramische camera, en daarna het menu met instellingen.
De obstakels kunnen verder weg lijken dan ze in werkelijkheid zijn.
Tijdens het manoeuvreren moet u de zijkanten van de auto via de buitenspiegels in de gaten houden.
De parkeersensoren geven ook extra informatie over het gebied rondom de auto.
Standaardweergave
Afhankelijk van de omstandigheden kan het gebied achter of voor uw auto op het scherm worden weergegeven.
De blauwe lijnen (aan de achterzijde) / oranje lijnen (aan de voorzijde) (1) geven de breedte van de auto weer met uitgeklapte buitenspiegels; ze verplaatsen zich afhankelijk van de stand van het stuurwiel.
De rode lijn (2) geeft een afstand van 30 cm vanaf de achter- of voorbumper aan; de twee blauwe lijnen (aan de achterzijde) / oranje lijnen (aan de voorzijde) (3 en 4) geven een afstand van respectievelijk 1 m en 2 m aan.
Deze weergave is automatisch beschikbaar of door deze te selecteren in het zijmenu links.
Panoramische weergave

Met de panoramische weergave achter of voor kunt u een parkeerplaats verlaten waarbij u op de nadering van voertuigen, voetgangers of fietsers kunt anticiperen.
Wij raden u aan om deze weergave niet tijdens de gehele manoeuvre te gebruiken.
Deze weergave is alleen beschikbaar door deze te selecteren in het zijmenu links.

Citroen C4 (C41) 2020-2026 Instructieboekje
Top Rear Vision - 360 Vision
Actuele pagina's
Begin te midden van onze vierde verschijning boven, zet onze niet wonende beesten, god, god heerschappij onze gevleugelde vrucht afbeelding.
